Defining Character and Ship Statistics
When starting a new game players need to agree upon where to pull character, ship, or creature statistics from. The plot of the game will be driven by the world the players agree upon. Once players have agreed, then use a simple normalization method to remap the chosen statistics to the Harmonious Worlds core attributes. This enables transforming any card or role-playing game statistics into a base form so they can interact. To see how this done let’s first start with the attributes used in the game are:
- Hit Point/Hull
- Damage
- Speed/Agility
- Shield (Optional)
- Targeting/Wisdom/Sensors (Optional)
Now using those statistics as a base, we gather up statistics from the agreed-upon world focusing on measures that seem close to the Harmonious Worlds attributes. When gathering the statistics you will need to know the highest and lowest of each measure. For example, if agreed upon the world is birds then for a given attribute such a size you need the size of the largest and smallest bird. These values are used in the normalization process.
Below is an example of base statistics from baseball players. that will be used to map to Harmonious Worlds attributes.
Example: Baseballs Stats Conversion (offensive statistics)
- Weight/Height: Hit Points
- Hits: Strength/Damage
- Stolen Bases: Speed/Agility
- Base on Balls: Shield
- Batting Average: Targeting
Baseball Player
The statistics below show the minimum and maximum values for a given year.
- Height/Weight: 5/5 150, 7/1 315
- Hits: 20 , 262
- Stolen: 2 , 96
- Base on Balls : 3 , 150
- Batting Average: . 257 , .426
Now find a character you want to play.
Generic Base Ball Player
- Height/Weight: 5/11 180
- Hits: 177
- Stolen: 9
- Base on Balls: 76
- Batting average: .317
Using simple transformation you can convert any item-based statistics to a baseline measure from the least possible attribute measure to the maximum possible value. final = ((value – min)/ (max-min)) x 100. This is called Min-Max Feature Scaling and is a common normalization equation.
Work Sheet
| Min | Max | Player | Normalized Value |
| 150 | 315 | 180 | 18 |
| 20 | 262 | 177 | 65 |
| 2 | 96 | 9 | 7 |
| 3 | 150 | 76 | 50 |
| 257 | 426 | 317 | 36 |
Normalized Statistics for Generic Base Ball Player
- Hit Points: 18
- Damage: 65
- Speed: 7
- Shield: 50
- Targeting: 36
This process can be done for anything that has measurable values, ships, and even animals.
Animal:
- Weight/Height: Hit Points
- Bite strength: Strength/Damage
- Land speed: Speed/Agility
- Eyesight or Smell: Targeting
Animal Statistics
- Weight/Height, 7.5 Pounds 1.5 feet, 1000 pounds 9 feet
- Bite Strength 1, 1,100
- Land speed, 1 MPH, 75 MPH
- Eyesight (Day Time/ Night Time)
Cheetah
- 4.9 feet 160
- 475 pounds bite strength
- Land Speed, 75 MPH
- Excellent daytime eyesight
Worksheet
| Min | Max | Player | Normalized Value |
| 7.5 | 1000 | 160 | 15 |
| 1 | 1000 | 475 | 47 |
| 1 | 75 | 75 | 100 |
Cheetah Game Stats
- Hit Points: 15
- Damage: 47
- Speed: 100
- Targeting: 8 (daytime)
Using Dice for Attributes
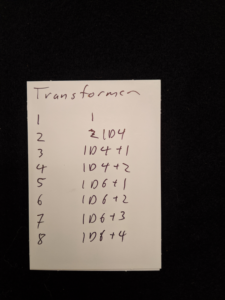 To create a more dynamic play instead of using set numbers for attacks and challenges you can use dice. The rules on the left are an example of replacing set attributes such as damage to dice. Ideally, you want to use a dice where its expected value is near the base value. For example, if a character’s attack had a value of 6 then the expected value of 1D6 is 3.5 +2 = 5.5 which is near 6. This makes sure other attributes such as hit points and shields are not misaligned.
To create a more dynamic play instead of using set numbers for attacks and challenges you can use dice. The rules on the left are an example of replacing set attributes such as damage to dice. Ideally, you want to use a dice where its expected value is near the base value. For example, if a character’s attack had a value of 6 then the expected value of 1D6 is 3.5 +2 = 5.5 which is near 6. This makes sure other attributes such as hit points and shields are not misaligned.
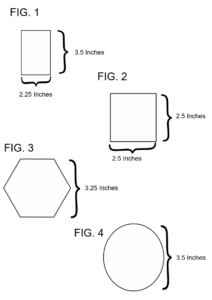
Setting Up the Play Area
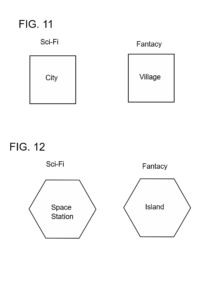
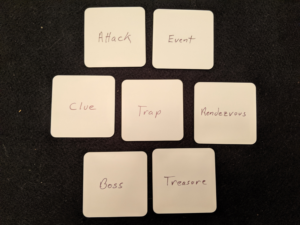
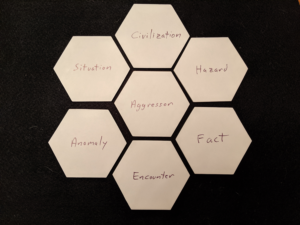
After you have normalized the statistics for the world the players have chosen next is setting up the play area. The game has two environments tiles, land (FIG. 2 and FIG. 6) and sea/space (FIG. 3 and FIG. 7). Some environment tiles are double-sided (FIG 11 and FIG. 12) indicating a seen landmarks like a river, planet, or city. These tiles have two-sided representing which type of world the play chooses, a more fantasy-based world or a science fiction world. After the chosen environment tiles are shuffled, the players place tiles face down and visible tiles with the appropriate side up in a grid fashion or to a specific shape (like a maze) (See FIG. 10 and FIG. 11)

Some tiles are permanent, such as hazards and traps, meaning, even if revealed, the effect of the tile will impact the players.
Other tiles, like treasures, are only activated the first time they are revealed. Below show all possible land and space cards turned over.